 Master Student, Wuhan University (2024-Now)
Master Student, Wuhan University (2024-Now)I'm currently a Master Student at LIESMARS, Wuhan University, under the supervision of Prof. Bisheng Yang, Prof. Zhen Dong, and Doctor Jianping Li from NTU in Singapore. Previously, I obtained my B.Eng degree from the School of Geoscience and Info-physics at Central South University in Changsha. My research focuses on enabling robots to achieve highly accurate self-localization and perform high-fidelity 3D reconstruction in unknown environments.
Education
-
Wuhan UniversityM.S. in LIESMARSSep. 2024 - present
-
 Central South UniversityB.S. in Surveying and Mapping Engineering (GPA Rank: 1/67)Sep. 2020 - Jul. 2024
Central South UniversityB.S. in Surveying and Mapping Engineering (GPA Rank: 1/67)Sep. 2020 - Jul. 2024
Honors & Awards
-
National Scholarship (RMB 8,000) — the highest honor for undergraduate students in China2023
-
Second-Class Scholarship (RMB 2,000)2025
-
First-Class Scholarship (RMB 2,000)2021 & 2022 & 2023
-
Outstanding Graduate of Central South University2024
-
Outstanding Student at Central South University2021 & 2022 & 2023
News
Selected Publications (*Co-First, †Corresponding) (view all )
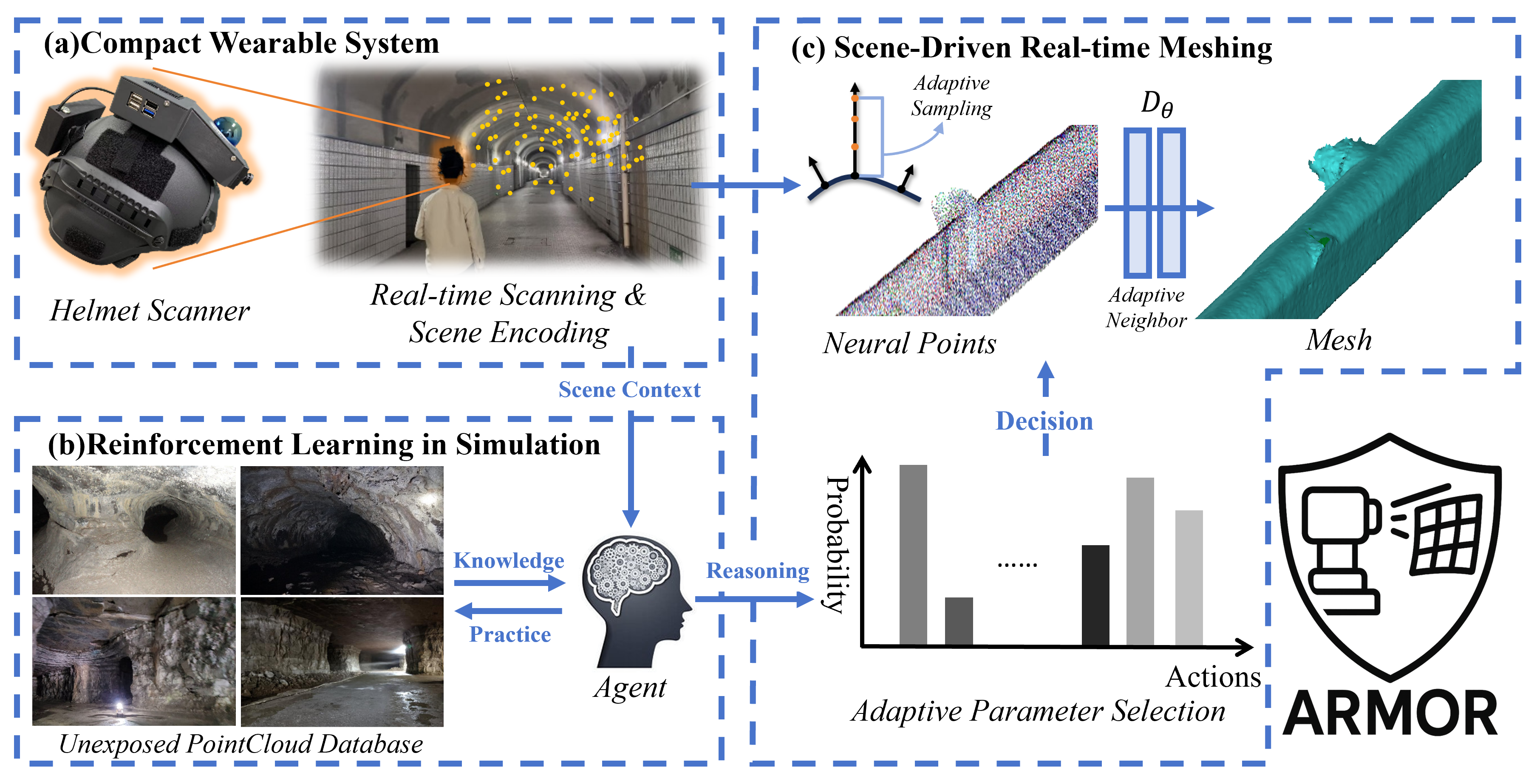
ARMOR: Adaptive meshing with reinforcement optimization of implicit fields for real-time 3D monitoring in unexposed scenes
Yizhe Zhang, Jianping Li†, Xin Zhao, Zhen Dong, Bisheng Yang
Adaptive Underground Meshing
ISPRS Journal of Photogrammetry and Remote Sensing 2026
ARMOR is a scene-adaptive framework for real-time 3D meshing in unexposed environments such as tunnels, caves, and lava tubes. The key idea is to jointly optimize geometry reconstruction and parameter tuning with spatio-temporal smoothing and reinforcement learning, enabling robust online meshing under diverse and unstructured scene conditions.
ARMOR: Adaptive meshing with reinforcement optimization of implicit fields for real-time 3D monitoring in unexposed scenes
Yizhe Zhang, Jianping Li†, Xin Zhao, Zhen Dong, Bisheng Yang
Adaptive Underground Meshing
ISPRS Journal of Photogrammetry and Remote Sensing 2026
ARMOR is a scene-adaptive framework for real-time 3D meshing in unexposed environments such as tunnels, caves, and lava tubes. The key idea is to jointly optimize geometry reconstruction and parameter tuning with spatio-temporal smoothing and reinforcement learning, enabling robust online meshing under diverse and unstructured scene conditions.
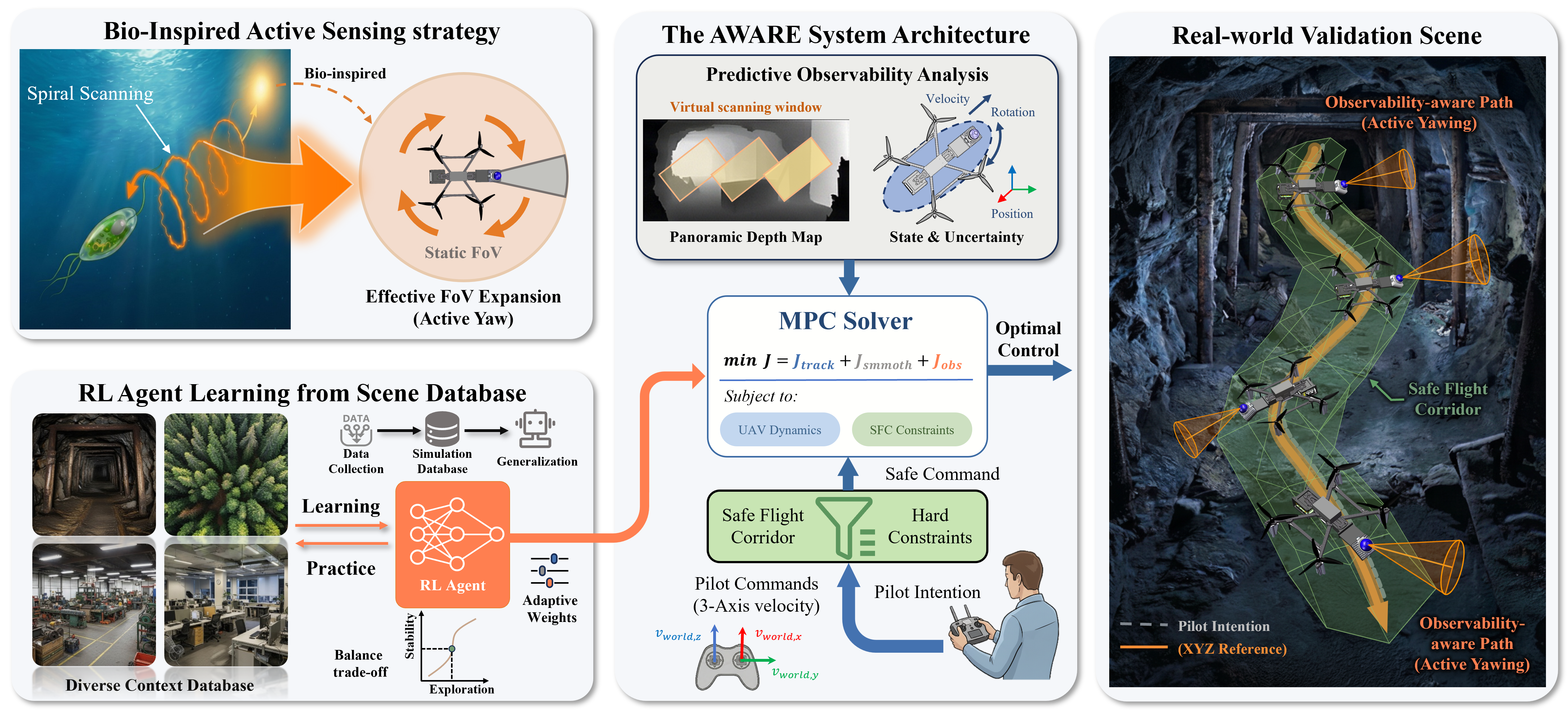
AWARE: Adaptive Whole-body Active Rotating Control for Enhanced LiDAR-Inertial Odometry under Human-in-the-Loop Interaction
Yizhe Zhang, Jianping Li†, Liangliang Yin, Zhen Dong, Bisheng Yang
Active Control & SLAM
arXiv Preprint 2026
AWARE is a human-in-the-loop active control framework for improving LiDAR-inertial odometry on resource-constrained UAVs in feature-sparse environments. The key idea is to exploit whole-body yaw rotations through an RL-guided differentiable MPC controller, enabling the UAV to actively seek informative viewpoints while preserving flight safety and operator intent.
AWARE: Adaptive Whole-body Active Rotating Control for Enhanced LiDAR-Inertial Odometry under Human-in-the-Loop Interaction
Yizhe Zhang, Jianping Li†, Liangliang Yin, Zhen Dong, Bisheng Yang
Active Control & SLAM
arXiv Preprint 2026
AWARE is a human-in-the-loop active control framework for improving LiDAR-inertial odometry on resource-constrained UAVs in feature-sparse environments. The key idea is to exploit whole-body yaw rotations through an RL-guided differentiable MPC controller, enabling the UAV to actively seek informative viewpoints while preserving flight safety and operator intent.
AGI2P: Benchmarking Aerial–Ground Image-to-Point cloud localization with a large-scale dataset
Yandi Yang, Jianping Li†, Youqi Liao, Yuhao Li, Ruizhe Niu, Yizhe Zhang, Zhen Dong, Bisheng Yang, Naser El-Sheimycc
Adaptive Underground Meshing
ISPRS Journal of Photogrammetry and Remote Sensing 2026
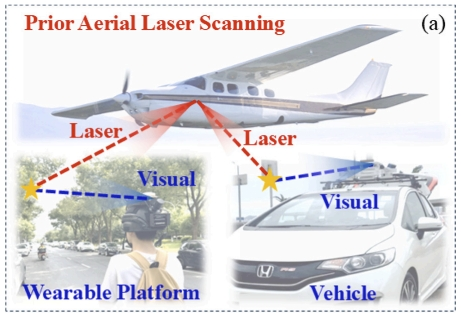
AGI2P is a large-scale benchmark for aerial–ground visual localization in dense urban environments, integrating ground-level mobile-mapping images with ALS point clouds from Wuhan, Hong Kong, and San Francisco (12 sequences, 69,000+ image–ALS pairs). The key idea is to use ALS as a scalable prior map and obtain accurate ground-truth poses via MLS-to-ALS alignment, enabling robust benchmarking of state-of-the-art I2P methods under challenging cross-view, cross-modal conditions.
AGI2P: Benchmarking Aerial–Ground Image-to-Point cloud localization with a large-scale dataset
Yandi Yang, Jianping Li†, Youqi Liao, Yuhao Li, Ruizhe Niu, Yizhe Zhang, Zhen Dong, Bisheng Yang, Naser El-Sheimycc
Adaptive Underground Meshing
ISPRS Journal of Photogrammetry and Remote Sensing 2026
AGI2P is a large-scale benchmark for aerial–ground visual localization in dense urban environments, integrating ground-level mobile-mapping images with ALS point clouds from Wuhan, Hong Kong, and San Francisco (12 sequences, 69,000+ image–ALS pairs). The key idea is to use ALS as a scalable prior map and obtain accurate ground-truth poses via MLS-to-ALS alignment, enabling robust benchmarking of state-of-the-art I2P methods under challenging cross-view, cross-modal conditions.

NeRF-based Localization and Meshing with Wearable Laser Scanning System: A Case Study in Underground Environment
Yizhe Zhang, Jianping Li†, Xin Zhao, Youqi Liao, Zhen Dong, Bisheng Yang
Underground Meshing
ISPRS-Annals 2024 Oral
NeRF-based Localization and Meshing is a wearable framework for real-time localization and mesh reconstruction in complex underground environments. The key idea is to couple LiDAR-inertial odometry with a scan-block representation that synchronizes poses and sequential laser frames, enabling efficient NeRF-based meshing with improved local accuracy.
NeRF-based Localization and Meshing with Wearable Laser Scanning System: A Case Study in Underground Environment
Yizhe Zhang, Jianping Li†, Xin Zhao, Youqi Liao, Zhen Dong, Bisheng Yang
Underground Meshing
ISPRS-Annals 2024 Oral
NeRF-based Localization and Meshing is a wearable framework for real-time localization and mesh reconstruction in complex underground environments. The key idea is to couple LiDAR-inertial odometry with a scan-block representation that synchronizes poses and sequential laser frames, enabling efficient NeRF-based meshing with improved local accuracy.