Bio-inspired Active Yawing
Inspired by biological active sensing, AWARE uses whole-body yaw rotation to expand the effective LiDAR sensing horizon and improve perception quality without extra mechanical actuation.
Project Video
AWARE is a bio-inspired active sensing framework designed for human-in-the-loop UAV operation in challenging real-world environments. By combining whole-body active yawing with hybrid adaptive RL-MPC control, it expands LiDAR perception, improves localization robustness, and supports safe real-time flight.
Research Overview
Human-in-the-loop (HITL) UAV operation in complex and safety-critical environments demands reliable onboard localization, yet lightweight platforms equipped with narrow-field-of-view LiDAR often suffer from limited sensing coverage. As a result, LiDAR-inertial odometry can become fragile in geometrically degenerate and feature-sparse scenes.
AWARE addresses this challenge with a bio-inspired whole-body active yawing strategy that expands the effective sensing horizon without additional actuation. The framework couples differentiable Model Predictive Control (MPC) with Reinforcement Learning (RL): MPC selects observability-aware yaw actions, RL adapts control weights online to balance information gain and flight stability, and a Safe Flight Corridor preserves operator intent for safe human-autonomy cooperation. Across both simulated and real-world experiments, AWARE consistently surpasses passive scanning and static optimization baselines while maintaining real-time performance on resource-constrained UAV hardware. These properties make AWARE particularly valuable for UAV-based surveying and mapping, where robust localization is essential for reliable geospatial data acquisition in complex field environments.
Inspired by biological active sensing, AWARE uses whole-body yaw rotation to expand the effective LiDAR sensing horizon and improve perception quality without extra mechanical actuation.
A differentiable MPC searches observability-aware yaw actions, while a lightweight RL policy adapts control weights online to balance information gain and flight stability.
A Safe Flight Corridor preserves operator navigation intent while decoupling autonomous yaw optimization, enabling safe and effective human-in-the-loop interaction.
Extensive simulation and real-world experiments show robust localization gains over passive scanning baselines while maintaining onboard real-time performance.
Abandoned Athletic Infrastructure
Underground Tunnel
Abandoned Bunker
Dense Forest
Simulator
Supports PX4-style trajectory rollout, expert reference guidance, and policy learning under diverse geometry conditions.
Dataset
Scenarios span structured, degraded, and unstructured environments with different observability and occlusion characteristics.
Training Setup
The first 50% of each reference trajectory is used for training, while the remaining 50% is reserved for evaluation.
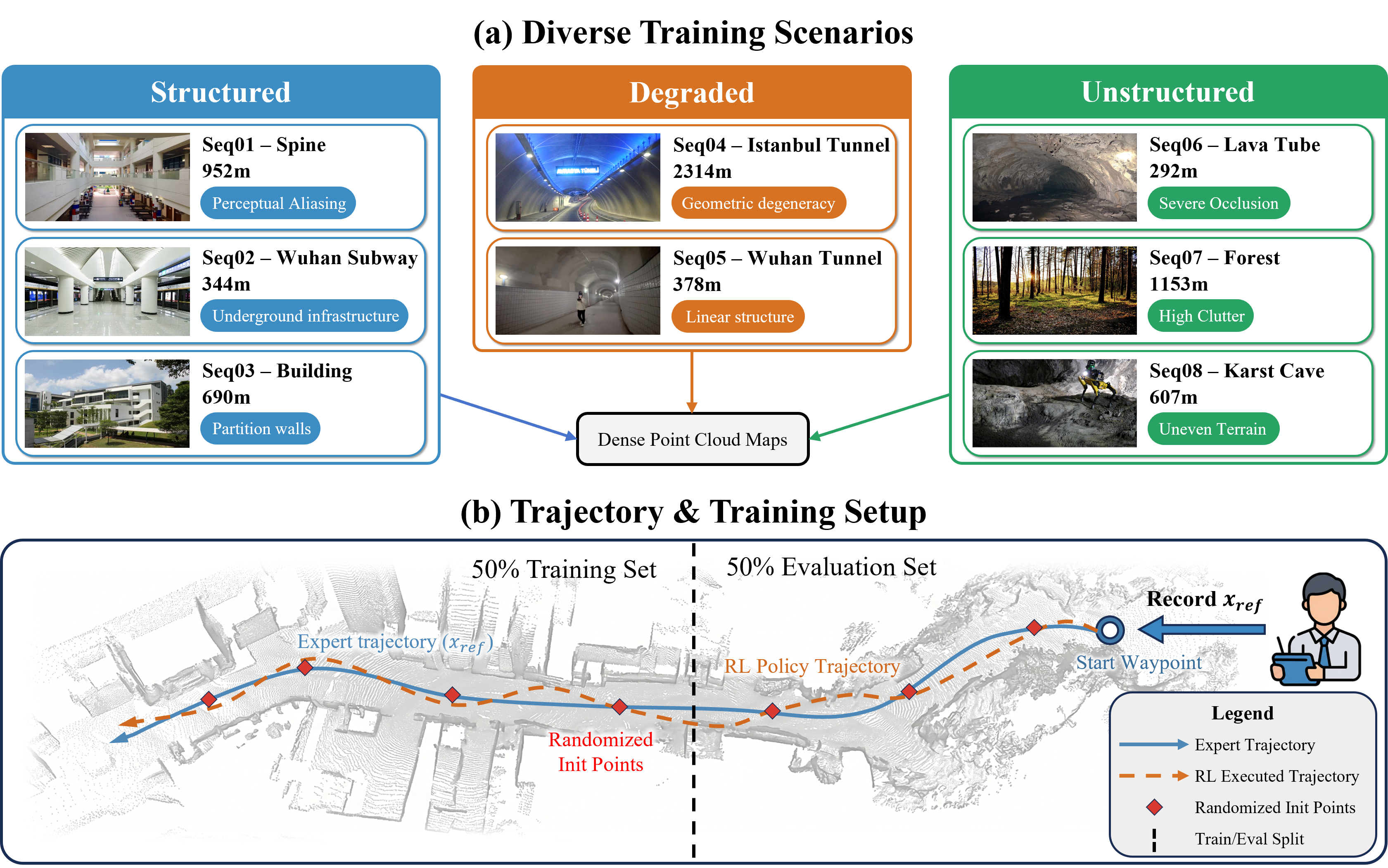
952 m
Linear corridor with repetitive vertical columns.
344 m
Large-scale indoor scene with repetitive patterns.
690 m
Multi-level complex environment with partition walls.
2314 m
Featureless tunnel with strong geometric degeneracy.
378 m
Unexposed space dominated by linear structure.
292 m
Irregular curvature with severe occlusion.
1153 m
High clutter and unstructured vegetation.
607 m
Complex topology with uneven terrain.
@misc{zhang2026awareadaptivewholebodyactive,
title={AWARE: Adaptive Whole-body Active Rotating Control for Enhanced LiDAR-Inertial Odometry under Human-in-the-Loop Interaction},
author={Yizhe Zhang and Jianping Li and Liangliang Yin and Zhen Dong and Bisheng Yang},
year={2026},
eprint={2604.10598},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.10598},
}